8 Decision Trees and Random Forest
Decision Tree
- Interpretability: Given a linear classifier dinfed by \(\va\theta=[\theta_1,\theta_2,\dots,\theta_d]\). How can we interpret the meaning of each parameter/coefficient? \[\norm{\theta_i}\text{: how this feature contributes to the decision.}\] To fit nonlinear model, we can use kernels. However, with kernels, the fitted parameter \(\va\theta\) becomes a blackbox, and we lose interpretability (especially when we use RBF kernels, \(\va\theta\in\R^\infty\)).
- A different approach: Decision Tree \[f:\mathcal{X}\to\mathcal{Y}\]
- Both features (\(\mathcal{X}\)) and labels (\(\mathcal{Y}\)) can be a continuous, descrete, or binary value.
Example 1 (Forming a Decision Tree) Suppose \(\va x\in\qty{0,1}^2\)
| \(x_1\) | \(x_2\) | \(y\) |
|---|---|---|
| 1 | 1 | 0 |
| 1 | 0 | 1 |
| 0 | 1 | 1 |
| 0 | 0 | 0 |
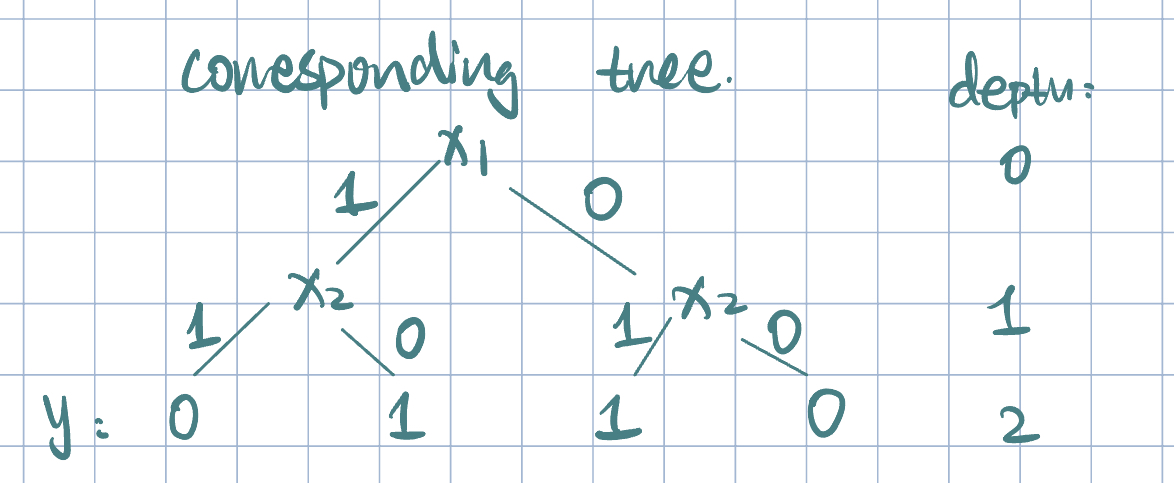
- We can use a boolean function of input feature to represent a decision tree.
Remark 1.
- As the number of nodes increases, the hypothesis space grows.
- Trivial solution: each examples has its own leaf node. If \(\va x\in\qty{0,1}^d\), then we have \(2^d\) leaf nodes.
- Problem: overffing, unlikely to generalize to unseen examples.
- Goal: Find the smallest tree that performs well on training data.
- However, finding the optimal partition of the data is NP-complete (hard).
- Instead, we can use a greedy appraoch:
- Start with empty tree.
- Find best feature to split on.
- Recursively build branches into subtree.
Entropy, Conditional Entropy, and Information Gain
Example 2 (How to Find the Best Split) We want to predict whether ot not a flight will get delayed: \[\text{training data: }\begin{cases}29\text{ positive}\\35\text{ negative}\end{cases}\implies[29^+, 35^-].\] Suppose \(\va x=[x_1,x_2]\) are two binary features:

Splitting by snow is better because it produces more certain labels. But, how do we measure uncertainty?
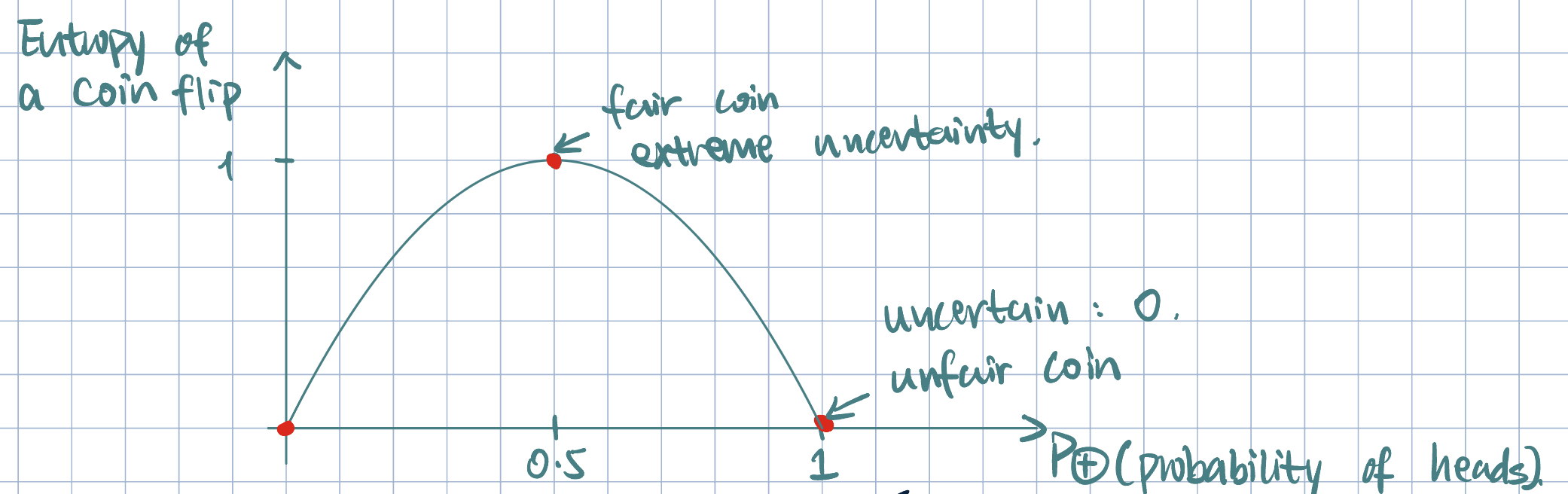
Definition 1 (Shannon’s Entropy) Let \(D_N\) be the training data, \(y\in\qty{-1,+1}\) be the binary outcome/label.
\(\P_\oplus\): fraction of positive examples
\(\P_\ominus\): fraction of negative examples \[\text{Entropy of }D_N=-\qty\Big(\P_\oplus\log_2\P_\oplus+\P_\ominus\log_2\P_\ominus)\]
The definition uses \(\log_2\) because entropy is measured in bits.
It measures the expected number of bits needed to encode a randomly drawn value of \(y\).
More generally, for categorical outcome \(y\in\qty{y_1,y_2,\dots,y_k}\), \[ \begin{aligned} H(y)&=-\qty\Big(\P(Y=y_1)\log_2\P(Y=y_1)+\P(Y=y_2)\log_2\P(Y=y_2)+\cdots+\P(Y=y_k)\log_2\P(Y=y_k))\\ &=-\sum_{i=1}^k\P(Y=y_i)\log_2\P(Y=y_i) \end{aligned} \]
Note: entropy is usually positive as \(\log_2\P(Y=y_i)\) is negative.
- Entropy and Peakyness:
- Imagine rolling a die and plotting the empirical distribution:
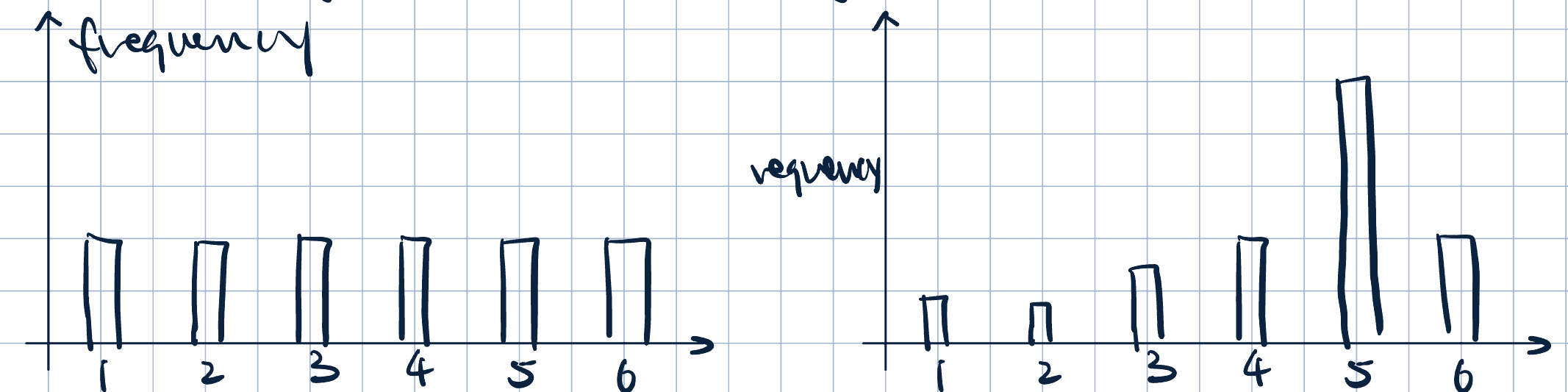
- On the left: high entropy, more uncertain about the label, less peaky distribution
- On the right: low entropy, less uncertain about the label, more peaky distribution
- Imagine rolling a die and plotting the empirical distribution:
Definition 2 (Conditional Entropy) \[H(Y\mid X=x)=-\qty(\sum_{i=1}^k\P(Y=y_i\mid X=x)\log_2\P(Y=y_i\mid X=x))\] \[H(Y\mid X)=\sum_{x\in X}\P(X=x)\cdot H(Y\mid X=x)\]
- \(H(Y\mid X)\) shows the average surprise of \(Y\) when \(X\) is known.
Remark 2.
- When does \(H(Y\mid X)=0\)? When \(Y\) is completely determined by \(X\).
- When does \(H(Y\mid X)=H(Y)\)? When \(Y\independ X\).
- We can use conditional entropy to measure the quality of a split:
- Idea: if knowing \(x_1\) reduces uncertainty more than knowing \(x_2\), we should split by \(x_1\).
Definition 3 (Information Gain (IG) / Mutual Information) \[ IG(X;Y)=H(Y)-H(Y\mid X), \]
- where \(H(Y)\) is the entropy of parent node, and \(H(Y\mid X)\) is the average entropy of the children note.
- \(IG\) measures the amount of information we learn about \(Y\) by knowing the value of \(C\) (and vice versa \(\implies\) symmetric).
Example 3 (Back to the Example) We want to predict whether ot not a flight will get delayed: \[\text{training data: }\begin{cases}29\text{ positive}\\35\text{ negative}\end{cases}\implies[29^+, 35^-].\] Suppose \(\va x=[x_1,x_2]\) are two binary features:
Calculate entropy of \(y\): \[H(y)=-\qty(\dfrac{29}{64}\log_2\dfrac{29}{64}+\dfrac{35}{64}\log_2\dfrac{35}{64})\approx0.9937\]
Calcualte the conditional entropy for each feature: \[ \begin{aligned} H(y\mid x_1)&=\dfrac{26}{64}\qty(-\dfrac{21}{26}\log_2\dfrac{21}{26}-\dfrac{5}{26}\log_2\dfrac{5}{26})+\dfrac{38}{64}\qty(-\dfrac{8}{38}\log_2\dfrac{8}{38}-\dfrac{30}{38}\log_2\dfrac{30}{38})\\ &=0.7278\\\\ H(y\mid x_2)&=\dfrac{45}{64}\qty(-\dfrac{18}{45}\log_2\dfrac{18}{45}-\dfrac{27}{45}\log_2\dfrac{27}{45})+\dfrac{19}{64}\qty(-\dfrac{11}{19}\log_2\dfrac{11}{19}-\dfrac{8}{19}\log_2\dfrac{8}{19})\\ &=0.9742. \end{aligned} \]
Calcualte the information gain: \[ \begin{aligned} IG(x_1;y)&=0.9937-0.7278=0.2659\\ IG(x_2;y)&=0.9937-0.9742=0.0195. \end{aligned} \] So, \(IG(x_1;y)>IG(x_2;y)\), \(x_1\) is a better split.
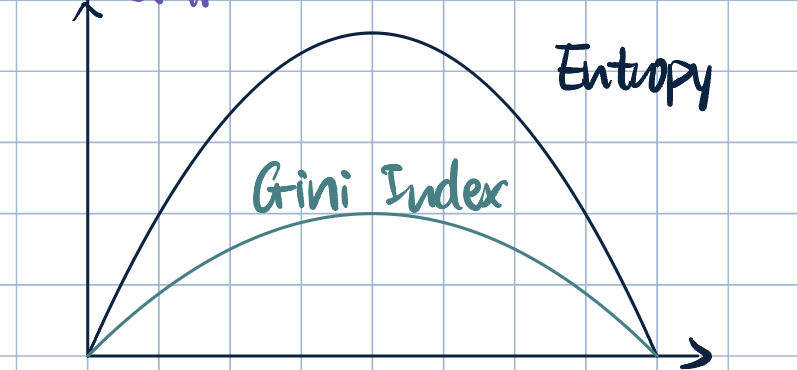
- Another Measure of Uncertainty: Gini Index and Gini Gain: \[ \begin{aligned} \text{Gini}(Y)&=\sum_{k=1}^k\P(Y=y_k)\qty(1-\P(Y=y_k))=1-\sum_{k=1}^k\P(Y=y_k)^2\\ \text{GiniGain}(X;Y)&=\text{Gini}(Y)-\sum_{x\in X}\P(X=x)\text{Gini}(Y\mid X=x). \end{aligned} \]
Remark 3. In practice, using \(IG\) or \(\text{GiniGain}\) may lead to different results, but it is unclear how different it can be.
Learning Decision Trees: A Greedy Approach
\[ \begin{aligned} \arg\max_{j=1,\dots,d}IG(x_j;y)&=\arg\max_j H(y)-H(y\mid x_j)\\ &=\arg\min_j H(y\mid x_j). \end{aligned} \]
- When to stop growing a tree? (Stopping Criteria)
- When all record have the same label (assume no noise).
- If all record have identical features (no further splits possible).
Remark 4. We should not stop when all stributtes have \(0\ IG\). See Example 1.
- How do we avoid overfitting? We want simpler trees.
- Set a maximum depth
- Measure performance on validation data. If growing tree results in worse performance, stop.
- Post-prune: grow entire/full tree and then greedily remove nodes that affect validation error the least.
Ensemble Methods and Random Forest
- Goal: Descreae variance without increasing bias (recall bias-variance trade-off)
- Idea: Average across multiple models to reduce estimation error. But we only have one single training set, how can we learn multiple models? BAGGING
Bootstrap Aggregatting (BAGGING)
- General procedure:
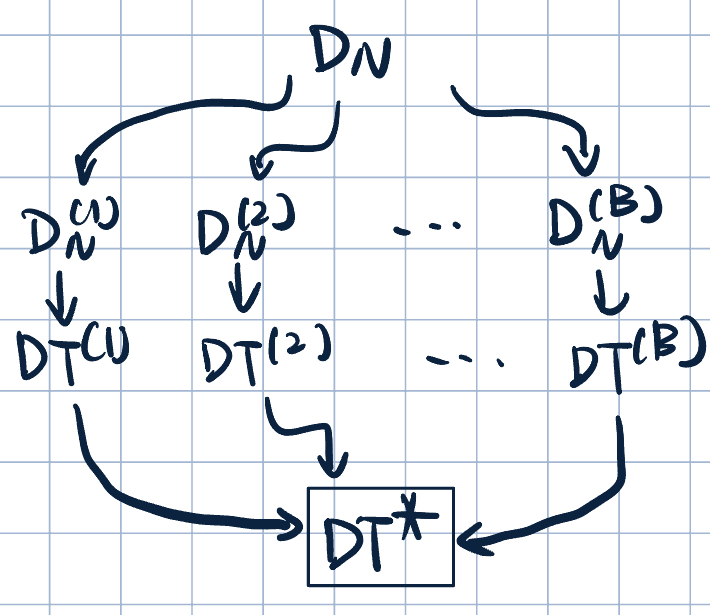
- Create \(B\) bootstrap samples: \(D_N^{(1)},\dots,D_N^{(B)}\)
- Train decision tree on each \(D_N^{(b)}\)
- Classify new examples by majority vote (i.e., mode)
- Why does bagging work? (Assume \(y\in\qty{-1,+1}\))
- Suppose we have \(B\) independent classifers: \[\hat f^{(b)}:\R^d\to\qty{-1,+1},\] and each \(\hat f^{(b)}\) has a misclassification rate of \(0.4\).
- That is, if \(y^{(i)}=+1\), then \(\P\qty(\hat f^{(b)}(\va x^{(i)})=-1)=0.4\quad\forall b=1,\dots,B\) and \(\forall\ i,\dots,d\)
- Now, applay baaged classifier: \[\hat f^{(\text{bag})}(\va x)=\arg\max_{y\in\qty{-1,+1}}\sum_{b=1}^B\1\qty(\hat f^{(b)}(\va x)=\hat y)=\arg\max\qty{B_{-1},B_{+1}},\] where \(B_{-1}\) is the number of votes for \(-1\), and \(B_{+1}\) is the number of votes for \(+1\). Then, \[B_{-1}\sim\text{Binomial}(B,0.4).\] Recall: if \(X\sim\text{Binomial}(n,p)\), then the probability of getting exactkly \(k\) successes in \(n\) trails is given by \[P(X=k)=\binom{n}{k}p^k(1-p)^{n-k}.\] Thus, misclassification rate of bagged classifer is \[\begin{aligned}\P\qty(\hat f^{(\text{bag})}(\va x^{(i)})=-1)&=\P\qty(B_{-1}\geq\dfrac{B}{2})\\&=1-\P\qty(B_{-1}<\dfrac{B}{2})\\&=1-\sum_{k=1}^{\lfloor B/2\rfloor}\binom{B}{k}(0.4)^k(1-0.4)^{B-k}.\end{aligned}\] Note: \[\lim_{B\to+\infty}\sum_{k=1}^{\lfloor B/2\rfloor}\binom{B}{k}p^k(1-p)^{B-k}=1\] as long as misclassification rate \(p<0.5\). So, as \(B\to\infty\), misclassification \(\to0\).
- Suppose we have \(B\) independent classifers: \[\hat f^{(b)}:\R^d\to\qty{-1,+1},\] and each \(\hat f^{(b)}\) has a misclassification rate of \(0.4\).
- Reality: Predcition error rarely goes to \(0\).
- Bagging only reduces estimation error (varaince).
- We don’t ahve independence assumption: classifiers trained on bootstrapped dataset are NOT independent.
Remark 5.
- On average, each bootstrap contain \(63.2\%\) of original data.
- How similar are boostrap samples?
- Probability of example \((i)\) is not selected once: \(1-\dfrac{1}{n}\).
- Probability of example \((i)\) is not selected at all: \(\qty(1-\dfrac{1}{n})^n\).
- Then, \[\lim_{n\to\infty}\qty(1-\dfrac{1}{n})^n=\dfrac{1}{e}\approx36.8\%.\] So, when \(n\to\infty\), the probability of example \((i)\) is not selected at all is \(36.8\%\).
Further Decorrelate Trees: Random Forest
- Random forest is an ensemble method designed specifically for trees (bagging applies more boardly).
- Two sources of randomness:
- Bagging
- Random feature subsets:at erach node, best split chosen from subset of \(m\) features instead of all \(d\) features.